De hoogste kwaliteit in combinatie met uitstekende prestaties heeft een naam: MOTOMAN
Pick & Place
Overzicht
Pick & Place en Bin Picking met Motoman Robots
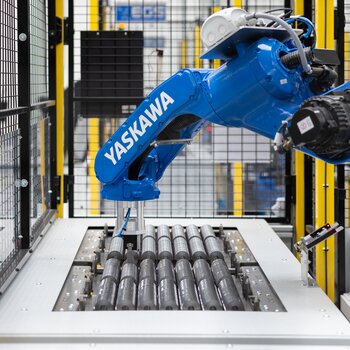
Een pick-and-place robot wordt gebruikt om het proces van het oppakken van objecten en het plaatsen ervan op een oppervlak in een ingestelde positie en oriëntatie te automatiseren. Deze actie wordt vaak gebruikt om producten te sorteren of te faseren in een specifieke array voor een stroomafwaarts proces, zoals trays of kisten, waar vaste machines of een andere robot de producten goed kunnen verwerken. Typische pick & place-taken worden gebruikt voor picken, sorteren, deeloverdracht, singulatie, sorteren en inspecteren. In veel gevallen komen onderdelen langs een transportband en de pick & place-beweging helpt om de onderdelen in een bepaalde volgorde op de plaatslocatie te sorteren of te rangschikken.
Pick and Pack is een variant van Pick & Place, gebruikt op Packaging, waarbij de plaatsingsbeweging complexer is om containers, dozen of kratten te vullen. Sommige mensen zeggen PPP - Pick, Place en Pack. Terminologie is niet gestandaardiseerd op dit gebied.
"Bin Picking" is een opkomende Robotic Piece Picking Technology met 3D Vision.
Snelheid en doorvoer
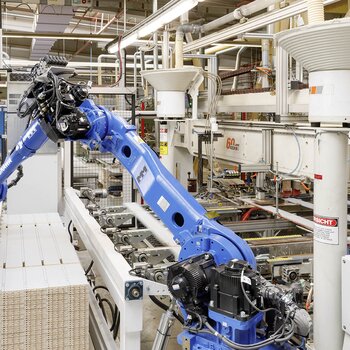
Alle Pick & Place-toepassingen hebben hetzelfde doel in hun specificatieboek - hoge doorvoer en lage cyclustijden! Picking & Placement is een veeleisende klus voor robots. Geen ruimte voor onbetrouwbare speelgoedmanipulatoren. Motoman Robots zijn stijf en stabiel genoeg om het werk 24/7 te doen, zonder oververhitting van de aandrijving, versnellingsbakremmen of bouten en armen die na enkele weken rondvliegen....
Motoman robots en producten voor picking en plaatsing
Voor picken, sorteren, deeloverdracht, singulatie, sorteren en inspectie op hoge snelheid variëren robots van 2 kg laadvermogen tot 10 kg met cyclustijden tot 150 pickcycli per minuut zijn gebruikelijk. Onze families van pick-and-place robotmodellen omvatten serieel gekoppelde scharnierende armen met 5- of 6-vrijheidsgraden, delta-stijl parallelle armen met 4 vrijheidsgraden en SCARA-stijl 4-graden vrijheidsarm.
Pick&Place met Delta Robots (MPP3-serie)
Qua snelheid kan niets onze Delta Robots (MPP3H, MPP3s) verslaan, die tot 4 pickcycli per seconde versnellen! Als u er vier op een rij plaatst over een transportband, uitgerust met MotoSight 2D Camera en MotoPick Software, kunt u picksnelheden bereiken in het bereik van 600 tot 800 onderdelen / minuut per picklijn.
Pick & Place met SCARA-robots (SG-serie)
SCARA-Robots (Horizontally Articulated Robots) zijn een goede keuze voor opwaartse/neerwaartse pick/place taken op een vlakke tafel. Onze gloednieuwe SG-serie robotmodellen (SG450, SG650) bieden ongelooflijke assnelheden (R-as 3000 graden / sec.), in staat om buitengewoon hoge picksnelheden uit te voeren met aantrekkelijke prijzen.
5-assige Pick & Place-robots (MPK-serie)
Die gelede robots zijn meestal aan het plafond gemonteerd over een riem, vergelijkbaar met de Delta Robots, maar veelzijdiger in bewegingsmogelijkheden. Ze kunnen een onderdeel kiezen en omzetten in de doelplaatsingslocatie.
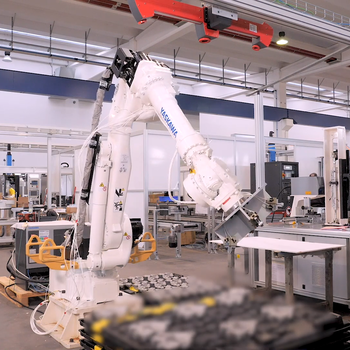
Pick & Place met 6-assige robots (MotoMini, GP Series)
Onze kleine 6-assige robots (MotoMini, GP7/GP8) zijn de keuze wanneer u het onderdeel tijdens de pickbeweging moet draaien/kantelen, of wanneer de pickrichting anders is dan de plaatsrichting.
Grotere 6-assige robots worden gebruikt voor complexere Pick&&Place-toepassingen, waarbij de bewegingsvrijheid van 6 bewegingsgraden echt vereist is. De hoogste snelheid is hier niet aan de orde. Bijvoorbeeld in bin picking-toepassingen, waar een machine vision-software de individuele doelpositie en het naderingstraject voor elk onderdeel afzonderlijk bepaalt, en waar van tijd tot tijd bewegingsmanoeuvres nodig zijn om met bakwanden en buuronderdelen in de bak om te gaan.
Pick & Place met collaboratieve robots (HC-serie)
Cobots zoals HC10 kunnen niet concurreren met die industriële robots in termen van snelheid, maar ze kunnen andere voordelen hebben om in aanmerking te komen voor Pick and Place-toepassingen - eenvoudig te gebruiken, hekloze installatie of gewoon een mens helpen tijdens zijn werk. Onze HC10-cobots zijn hybrides, die in staat zijn om over te schakelen van veilige menselijke interactiemodus naar hogere snelheden in fasen waarin de operator afwezig is. Collaboratieve robots (HC10), zou de keuze kunnen zijn in brownfield-omgevingen, waardoor installatieruimte wordt bespaard door hekken te vermijden. Ze zijn zeer flexibel in termen van hercodering en locatieflexibiliteit. Met Cobots kunt u zeer aantrekkelijke, slimme en slanke pickstations realiseren.
Conveyor Tracking en Line Tracking
Een basisfunctionaliteit voor robotbesturing voor Pick & Place-toepassingen is Conveyor Tracking, waarmee het traject van de robot kan worden gesynchroniseerd met een externe beweging die wordt vastgelegd door een encoder, zoals een transportband. De YASKAWA conveyor tracking functie ondersteunt zowel line tracking (na een lineaire beweging) als circular tracking (na een cirkelvormige beweging). Door een zeer snelle interpolatiecyclus en het ontwerp van ons transportbandsensorbord is de transportbandsynchronisatie zeer gevoelig en reageert hij perfect, zelfs bij kleine snelheidsveranderingen van de transportband.
MotoPick-software
De MotoPick Software maakt de installatie en programmering van die picklijnen absoluut eenvoudig, het doet alle berekeningen voor u en beslist automatisch welke robot de volgende is om een onderdeel te kiezen. Alle Motoman Robots kunnen worden gecombineerd met gesynchroniseerde transportbanden om pick-and-place-bewerkingen met hoge snelheid uit te voeren. Meerdere robots, vision-systemen en meerdelige transportbanden worden gecoördineerd door een gemeenschappelijke softwareoplossing voor nauwkeurige productsortering en het invoegen van pakketten. Met onze MotoPick Easy-to-configure software kunt u tot 4 Pick&And-robots in een rij achter een 2D-visioncamera plaatsen om binnenkomende onderdelen op de band te identificeren en de picktaak te verdelen over de robots die de riem delen. Dergelijke picklijnen kunnen echt enorme pickpercentages bereiken!
Robotprogrammering met PLC/IEC 61131-functieblokken (MotoLogix)
Pick&Place Robots zijn vaak ingebed of geïntegreerd in een PLC/Logic- of Motion Controlled machineomgeving. Als u een OEM bent voor High Speed Packaging Lines, met veel beweging in uw productielijn en slechts een paar Pick / Place / Palletiseerrobots hier en daar, zullen uw PLC-programmeurs onze PLC-gebaseerde programmeertool Motologix leuk vinden. The Robot motion jobs are programmed completely by the PLC Programmer in his IEC-based Program Development Environment. Motologix provides all the PLC Function blocks required to control pick&place motion of the robot, including conveyor support. No need to dig out a robotic teach pendant or to learn a robot programming language.
Robotgrijpers
Een cruciale succesfactor voor een succesvolle gerobotiseerde pick&place installatie is de grijper. De extreme traagheid van een snelle robotcyclus kan een werkstuk gemakkelijk uit de grijper laten vliegen als het niet goed wordt bevestigd. Er worden vaak zuiggrijpers gebruikt, soms ondersteund door slimme mechanische eigenschappen om te voorkomen dat het onderdeel wegvliegt door de extreme versnellingen. Yaskawa kan u helpen met een uitstekend netwerk en expertise met leveranciers van allerlei pneumatische, stepper-/servo elektrische of exotische grijperproducten. 3D-printtechnologie wordt vaak gebruikt voor het ontwerp van grijpervingers of grijperbehuizingen, om gewicht, uitvaltijd en vervangingstijd van reserveonderdelen te verminderen.
Sommige collaboratieve grijpers zijn expliciet ontworpen voor veilige mens-robotsamenwerking.
Alle MOTOMAN Robot-Gripper-installaties zijn eenvoudig te implementeren - ongeacht of u profiteert van onze rijke interface-knowhow of van onze Smart-serie grijpers, een slim initiatief van Yaskawa voor Plug&Play Grippers. De meeste 5-/6-assige Motoman-robots hebben standaard interne mediale kabels in de arm, waardoor u externe kabeljurkpakketten kunt vermijden. Yaskawa-controllers ondersteunen alle soorten I/O-, veldbus- of Wi-Fi-communicatie met grijpers, waaronder Ethernet, Profinet, Profibus, Devicenet, Ethercat, IOLink. Alle lesmethoden (Standard Teach Pendant, Smart Pendant en Hand Guiding) bieden eenvoudige en snelle methoden om grijpers te bedienen. Sommige kracht/ positie gecontroleerde grijpers vereisen parametrering, sommige oplossingen zijn ingebed in de HMI van de robot voor meer gemak.
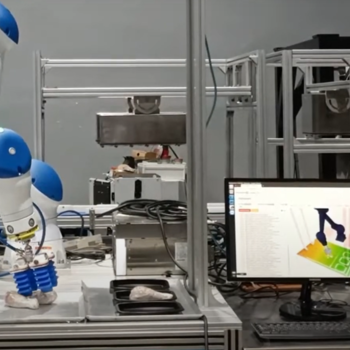
Machine Vision Systemen (2D, 2.5D, 3D)
Bij veel Pick & Place-operaties zijn Machine Vision-systemen betrokken. Machine Vision Technology heeft de afgelopen 5 jaar spannende vooruitgang geboekt - in termen van miniaturisatie, eenvoud en mogelijkheden. Ze stellen robots in staat om ongesorteerde onderdelen op een tafel, een dienblad of een transportband te identificeren en te lokaliseren. Met wat softwareverwerking erbij betrokken, vertellen ze de robot waar hij onderdelen moet oppakken en hoe hij ze moet benaderen. Bovendien maken ze inspectie van onderdeelkenmerken en assemblageresultaten mogelijk.
Op machine vision gebaseerde Pick & Place is een balans tussen snelheid en flexibiliteit.
Motoman Robots kunnen naadloos worden geïntegreerd met allerlei soorten vision-systemen. Of vraag ons naar onze generieke of individuele interfaces voor honderden verschillende camera- en softwareoplossingen die we in de loop der jaren met succes in werkende applicaties hebben gebracht.
MotoSight 2D-visie
Voor Pick and Place-toepassingen is eenvoudige 2D-machinevisie goed genoeg om pickposities op een tafel of een transportband te lokaliseren. Onderdelen moeten vrij vlak zijn en niet overlappend, en de 2D Vision-systemen vereisen een constante goede verlichting en een hoog contrast tussen het onderdeel en de achtergrond.
MotoSight2D is een volledig geïntegreerd Smart Camera-product dat we aanbevelen, maar we ondersteunen alle soorten 3rd party Vision Camera-systemen.
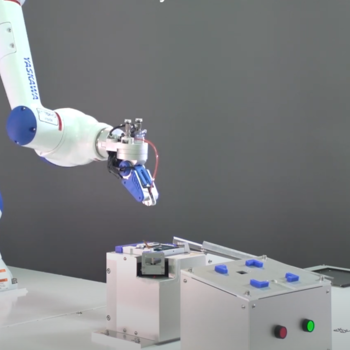
3D Bin Picking, Intelligent Picking, Deep Learning
Robotic Bin Bicking is een technologie die in staat is om onderdelen uit een bak te halen die eerder willekeurig zijn ingegoten, en nu komen ze in chaotische volgorde. Om deze uitdaging aan te gaan, combineert Robotic Bin Picking geavanceerde 3D Machine Vision-technologie, complexe padplanningssoftware en slimme onderdelengrijpertechnologie.
Bin-picking technologie is zeer flexibel en heeft zich de afgelopen jaren sterk ontwikkeld op het gebied van snelheid, herkenningsintelligentie en installatiegemak.
Vanuit het oogpunt van Machine Vision hebben Bin Picking-toepassingen verschillende uitdagingsniveaus:
- Alle onderdelen in de bak zijn identiek, de geometrie van onderdelen is eerder bekend - monsteronderdelen kunnen van tevoren worden getraind.
- verschillende onderdeelvarianten in de bak, deelgeometrie is eerder bekend - monsteronderdelen kunnen van tevoren worden getraind
- Verschillende onderdeelvarianten in de bak, deelgeometrie is niet precies bekend - monsteronderdelen kunnen niet van tevoren worden getraind.
Terwijl 1. en 2. kan worden aangepakt met klassieke 3D-deelherkenningssoftware, 3. kan een geval zijn voor kunstmatige intelligentie en neurale netwerken.
Het automatiseren van de distributie van een brede en gevarieerde mix van onderdelen of SKU's is geen uitdaging meer. Vooruitgang in 3D vision-robotica verbetert zowel de snelheid als de nauwkeurigheid bij het identificeren en sorteren van bijna elke mix van onderdelen die in bakken, bakken, koffers of dozen worden gepresenteerd. Conventionele vision-systemen vereisen monsteronderdelen om elke onderdeelvariant en picksituatie te trainen, terwijl de nieuwste deep learning-softwaretechnologieën het mogelijk maken om willekeurig onderdelen te selecteren die automatisch worden getraind door een neuraal netwerk. Bin Picking is een uitdagende toepassing - wij kunnen u helpen met expertise om typische obstakels te overwinnen.
Het gebruik van High Tech zoals Bin Picking is prima, maar het is geen "Must Have" waar een meer pragmatische oplossing hetzelfde werk zou doen. Onze engineers helpen u bij het vinden van de beste en meest betrouwbare pickoplossing voor uw use case. Soms is het mogelijk om de onderdeelpresentatie ver stroomopwaarts te wijzigen, zodat u een eenvoudigere technische oplossing kunt installeren, bijvoorbeeld door onderdelen in lagen op te slaan.
Pick & Place deelvoeding met Motoman Robots
Vibration Part Feeders zijn een innovatieve manier om onderdelen of bevestigingsmiddelen aan een robot te presenteren. In combinatie met slimme feeders zijn kleine Robots zoals de MotoMini, SG400 of GP8 een alternatief voor klassieke trilkomfeeders. Deze schroefvoedingsmethode is niet goedkoper of sneller dan klassieke schroefvoeding, maar veel flexibeler en stabieler - minder tolerantievereisten voor de schroeven, snellere installatie zonder dat schroefmonsterbatches nodig zijn en gemakkelijk te gebruiken om geometrie of tolerantieveranderingen te schroeven.